In the realm of UAV (Unmanned Aerial Vehicle) surveying, achieving high-accuracy geospatial data is paramount. Three primary techniques— Ground Control Point (GCP), Real-Time Kinematic (RTK) and Post-Processing Kinematic (PPK)—are employed to enhance dataset accuracy. Understanding their differences, advantages, and ideal use cases is crucial in order to determine the most suitable method for a given project.
What is RTK?
Real-Time Kinematic (RTK) positioning allows UAV systems to collect highly accurate geospatial data during flight. This technology enhances the GPS signals received by the drone in real time, correcting any positioning errors on the fly and delivering centimeter-level accuracy. RTK technology provides real-time corrections to GPS data by utilizing a base station that communicates directly with the drone. This setup allows for immediate positional accuracy during flight, making it ideal for applications requiring instant data. Every GPS-enabled UAV uses satellite signals to determine its position. But standard GPS alone can have a positioning error of 1 to 5 meters due to factors like satellite clock drift, signal multipath, and atmospheric interference. RTK solves this by providing real-time correction data.
RTK Workflow
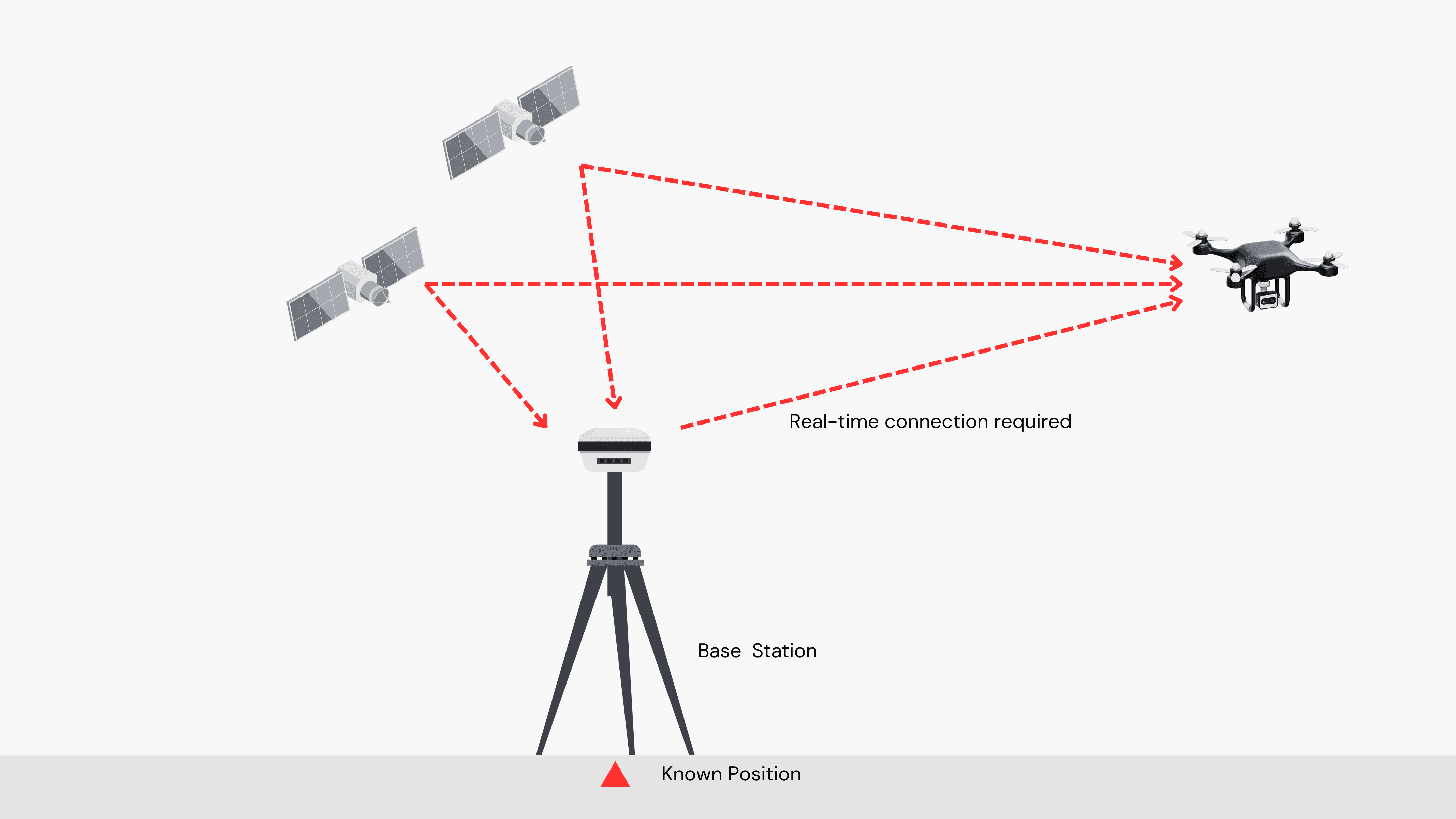
An RTK enabled drone is required along with base station positioned over a known point connected to a CORS network needs to accurately mark the location of the image in real time. Real-time kinematic (RTK) processing on a drone records GPS information and geotags images as they’re captured during flight. The GPS location is recorded for the center of each image. As the UAV continues to fly, base station actively transmits raw GPS correction data. The drone’s onboard GPS receiver uses this information, along with its own satellite data, to calculate its precise position relative to the base station in real time.
For RTK to work correctly, the UAV must maintain a continuous connection with the base station throughout the flight. If that connection is disrupted—whether due to signal interference, obstacles blocking the signal, antenna misalignment during sharp turns, or poor coverage—the accuracy of the data suffers. Until the UAV re-establishes communication with the base, positional data may be unreliable.
Accuracy of RTK
RTK drone positioning relies mainly on information broadcast from satellites and a ground-based receiver. With these two systems combined, you can expect to achieve an accuracy range of up to 1-3cm in the horizontal direction. And 2-5cm vertically.
Pros and Cons of RTK
Pros | Cons |
|---|---|
Immediate data accuracy during flight. | Higher equipment and operational costs |
Reduces the need for extensive ground control points. | Dependent on a stable communication link between the drone and base station |
Suitable for time-sensitive projects. | RTK performance tends to degrade with distance from the base station. |
Reduced post processing |
What is PPK?
Post Processing Kinematic (PPK) involves collecting GPS data during the flight with the UAV's onboard GNSS receiver. Simultaneously, a base station (which is typically stationary and has a known, fixed position) collects GPS data from the same satellites. After the flight, the data from the drone and the base station are combined and processed in software to correct any errors in the drone’s positioning. This method is beneficial when real-time accuracy is not critical, and post-flight processing can be utilized.
PPK Workflow
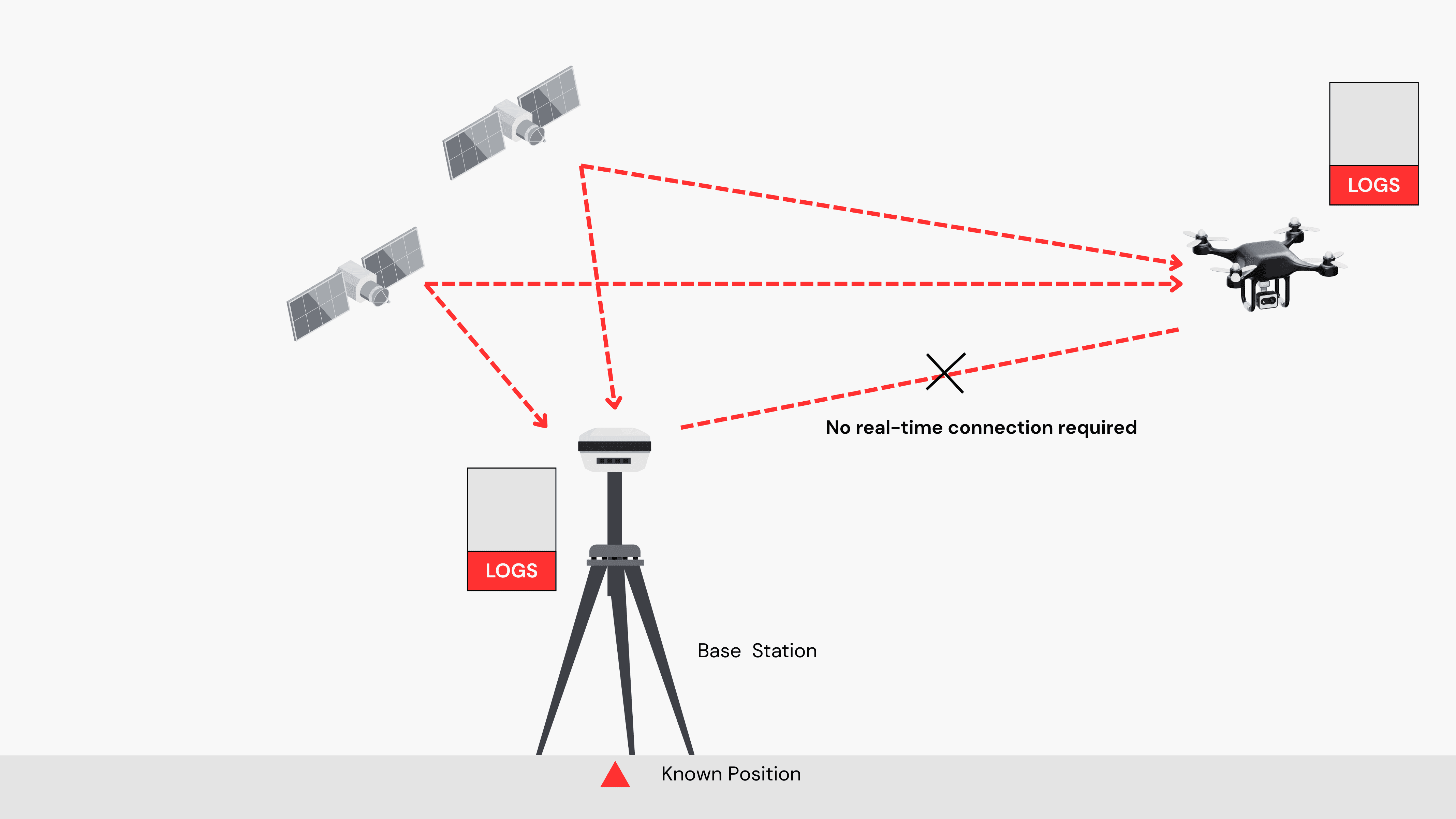
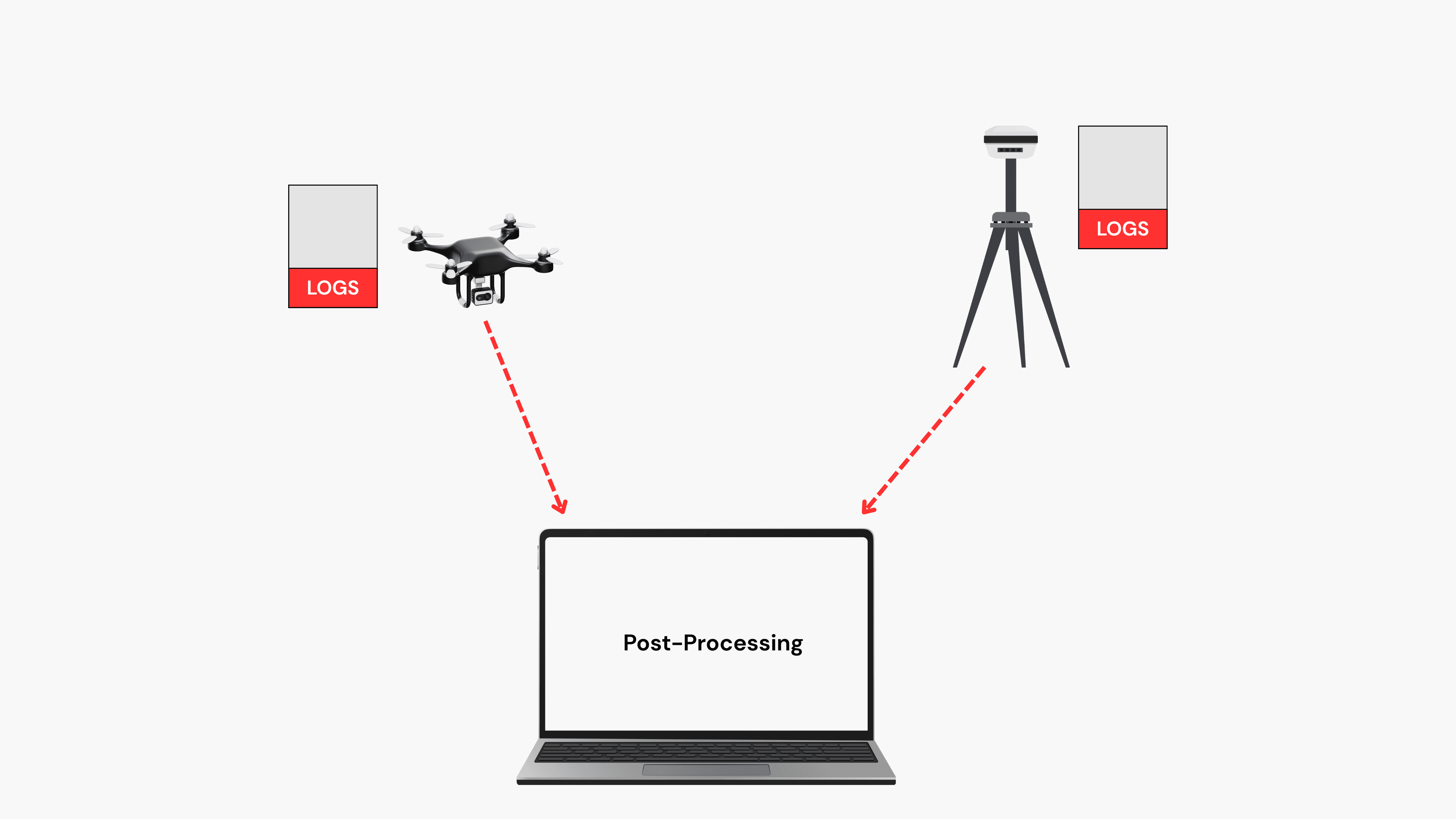
As the drone flies, it captures GPS coordinates for each image or data point, much like RTK, but without relying on a real-time correction link. The drone logs raw GPS data, including time stamps, satellite signals, and positioning. This raw data contains all observations without any calculations. Meanwhile, a base station at a fixed, known location collects GPS data from the same satellites. The base station’s position is known and can be used to compute the differences between its actual position and the satellite-based GPS position.
After the flight, the raw GPS data from the drone and the base station data are imported into post-processing software. The software compares the recorded positions from the drone to the known base station positions and corrects the drone’s GPS data by applying the calculated offsets. These corrections compensate for common GPS errors such as atmospheric interference, satellite signal multipath, and clock drift.
Accuracy of PPK
While both PPK and RTK offer similar levels of accuracy, RTK relies on real-time corrections from a base station. These corrections can be interrupted by temporary signal disruptions, and issues such as incorrectly positioned base stations can cause inaccurate or inconsistent results.
On the other hand, PPK provides a more stable and precise approach since it doesn’t depend on an ongoing data stream during the flight. The setup process is quicker because you don’t need to establish the base station’s position before flying—it can be done afterward. This also eliminates the need for onboard data processing and calibration, significantly reducing latency and enhancing overall accuracy.
Pros and Cons of PPK
Pros | Cons |
|---|---|
PPK doesn’t rely on continuous real-time communication with the base station during flight. | PPK requires post-flight processing. This adds extra time to the workflow |
Because PPK doesn’t require the complex real-time communication system used in RTK, the setup costs can be lower | PPK requires specialized post-processing software and can be more labor-intensive in terms of data management compared to RTK |
Reduction in ground control point | PPK is not ideal for real-time surveying or monitoring where immediate corrections are required |
PPK allows a longer base line when compared to RTK |
What is GCP?
Ground Control Points (GCPs) are physical markers placed on the ground that have precisely known GPS coordinates. These markers are used in drone mapping and photogrammetry to georeference and correct aerial data, ensuring that the spatial information captured by the drone aligns accurately with real-world coordinates.
Think of GCPs as "anchor points" that tie your drone imagery to the Earth’s surface, helping to reduce positional errors and increase the accuracy of your final maps, models, and measurements.
GCP Workflow
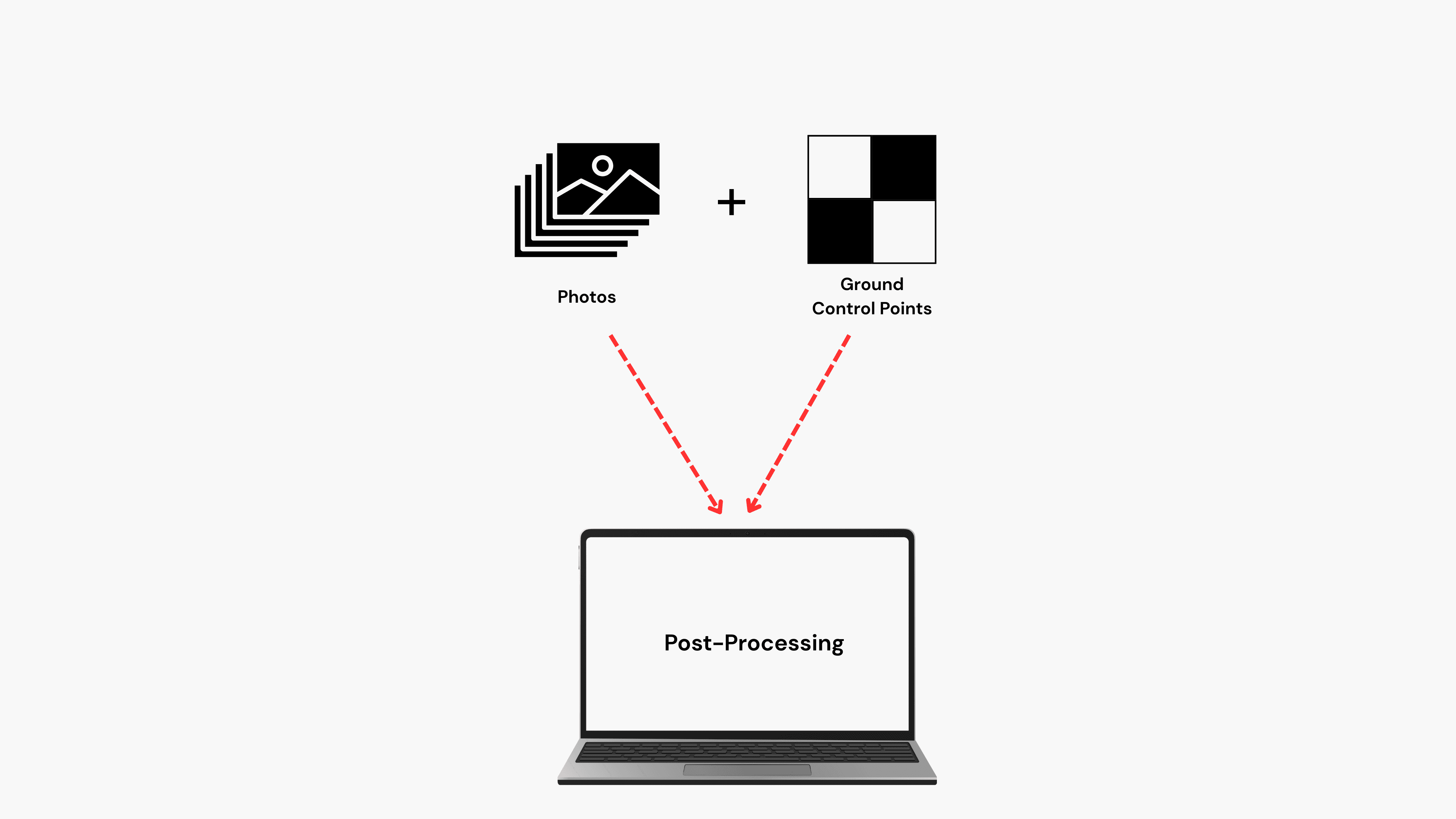
During a typical workflow, GCPs are strategically distributed across the survey area—especially at corners, center, and areas with elevation changes—and their coordinates are recorded using a high-precision GNSS device. These targets are then captured in drone images during flight, and later used in post-processing software to georeference the aerial data, significantly improving positional accuracy.
After the flight, images and GCP coordinates are loaded into photogrammetry software, where operators tag the GCPs in the images. This aligns the data to real-world coordinates, reducing GPS errors and ensuring high-accuracy outputs like maps and 3D models. While more time-consuming than RTK or PPK, GCPs are still the go-to for survey-grade precision.

Accuracy of GCPs
With proper planning and equipment, GCPs can help achieve sub-5 cm accuracy in both horizontal and vertical measurements—often outperforming standalone GPS and even rivalling RTK/PPK drone workflows
Pros and Cons of GCPs
Pros | Cons |
|---|---|
Ensures your outputs are aligned with real-world coordinates—vital for legal, engineering, or construction-grade work. | Setting up and surveying GCPs takes time and effort, especially on large or rugged sites |
Reliable in GPS-Challenged Areas | Requires extra personnel and equipment, especially when surveying GCPs with high-precision GNSS. |
You can still achieve excellent accuracy with a basic GPS drone, as long as GCPs are used properly. | In some terrains (dense forests, cliffs, restricted zones), placing GCPs can be difficult or unsafe. |